Vehicle Dynamics Simulation
For the 2023-24 competition year on Longhorn Racing Electric (UT Austin's Formula SAE electric car team), I'm working with a mechanical engineer to revamp our simulation capabilities. For reference, we had a steady-state simulation last year.

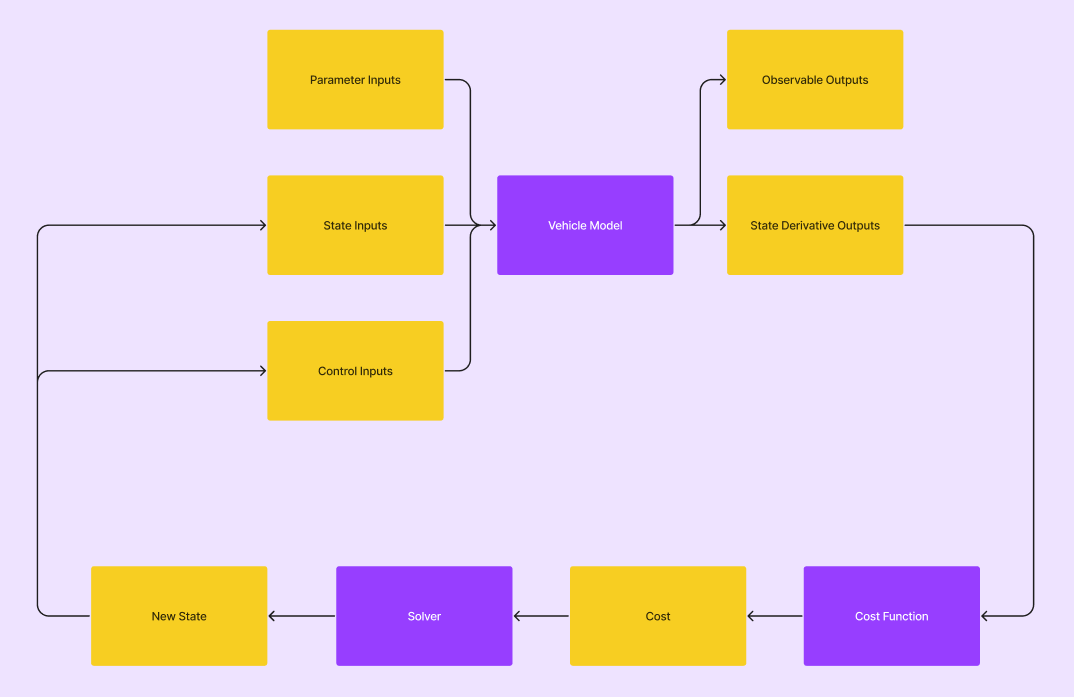
Above is a diagram I made in Figma with our planned implementation of a steady-state vehicle simulation, which is pretty similar to last year.

This year, we're aiming for a transient simulation, like the one pictured above. In terms of vehicle dynamics, this won't tell us much more than last year's simulation besides things like sprung assembly accelerations, yaw rate accelerations, and the effects of parameters like CG bias.
However, the transient simulation will be very useful to us on the electronics team because we're pursuing the creation of a custom Vehicle Control Unit this year. We're currently working on wrapping our Vehicle Control Unit firmware in our transient simulation so we can test the VCU firmware before the car hits the ground.
This simulated testing will help us validate software like traction control and even get an idea for tuning parameters like PID constants where necessary. In future years, we plan to use the transient simulation to estimate the laptime gains of implementing systems like anti-lock brakes, semi-active suspension, and even all-wheel steer.
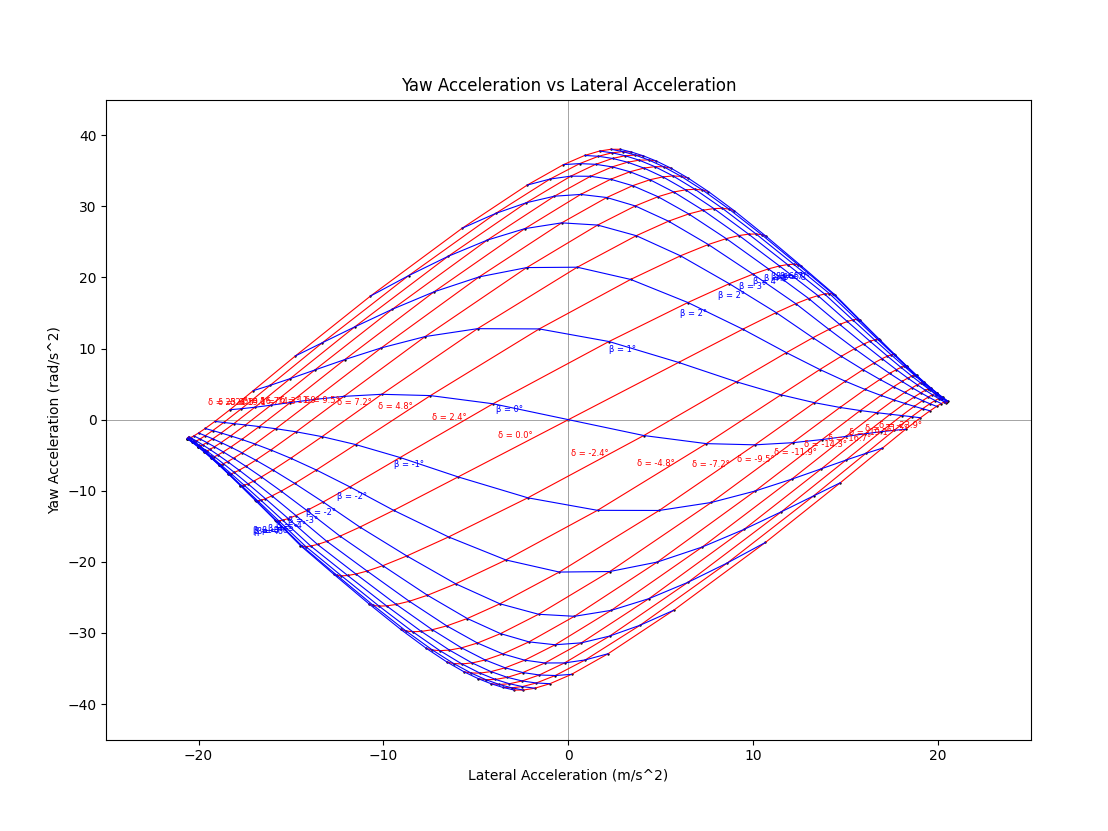
Our progress so far is an MMM diagram, which shows how much control and stability a driver has during turning.

View the code on Github ↗.